📚T-MD脱靶量协议

©️版权声明
本协议是 瞳赋® Tofu Intelligence® 独家财产,受版权法和条约的保护,未经授权不得转载或复制他用。
协议提供对接测试客户端,方便客户快速应用。⚠注意:本协议目前仅Tofu6支持。
若您使用脱靶量协议,建议使用我司配准标定后的数字接口相机AI一体版本,帧率支持25Hz/50Hz两种规格。
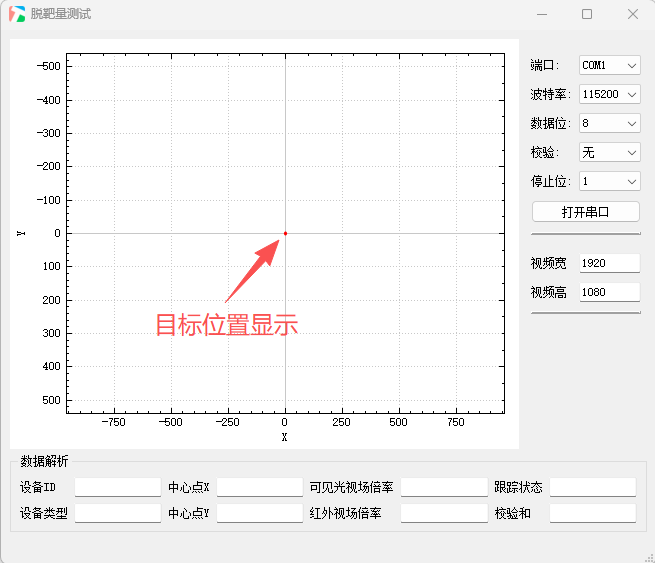
0. 测试软件下载
1. 通信约定
本指令用于与Tofu向伺服控制器发送脱靶量与镜头信息,交由伺服控制板实现基于脱靶量的目标跟踪,一组数据 16 Byte。
通信接口为RS485(默认)或TTL 3.3V,波特率 115200,切换协议后Tofu6将自动切换到此波特率。
Tofu6的自定义参数5设置为2自动切换波特率与协议为T-MD脱靶量协议。
2. 目标跟踪脱靶量推送
本指令由Tofu产品在开始跟踪后实时发送目标跟踪坐标信息至伺服。
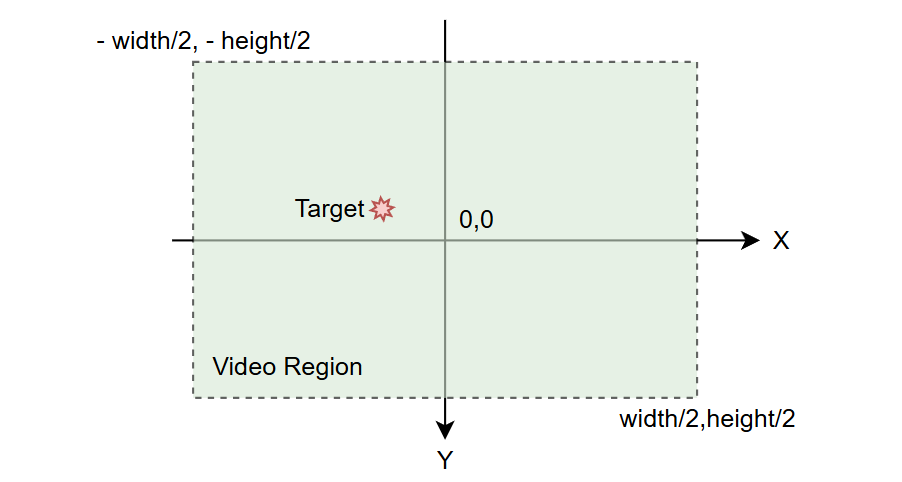
目标坐标系如下图,视频宽width,高height,画面中心位置为(0,0)坐标,右下方向为X,Y轴正方向。
A7 XX 02 0C 02 MM XH XL YH YL VLH VLL TLH TLL OT HHXX:设备ID,默认01
MM:00代表可见光,01代表热红外。
参考坐标零点位于画面中心位置,推送坐标信息为16位带符号short型数据。XH:目标中心点X坐标高八位
XL:目标中心点X坐标低八位,带符号short类型YH:目标中心点Y坐标高八位
YL:目标中心点Y坐标低八位,带符号short类型VLH,VLL:可见光视场比例系数,高八位,低八位,无符号十六位整数,当前水平视场角 = 60°*100/VL
例:00 5F 代表当前水平视场角为63°,07 D0 代表当前水平视场角为 3°。TLH,TLL:热红外视场比例系数,高八位,低八位,无符号十六位整数,当前水平视场角 = 60°*100/TL
OT:跟踪状态,00 表示丢失跟踪,01表示正在跟踪,02表示正在预测跟踪(目标已被遮挡)
HH:校验和。除 A7 和 HH 之外所有字节相加,取和的二进制低 8 位。
例:A7 01 02 0C 02 00 00 05 00 05 00 64 03 E8 01 6B
代表目标位置在中心右下(5,5)坐标位置,可见光当前水平视场角60度(60*100/0x0064),
红外当前水平视场角6度(60*100/0x03E8),当前在进行可见光视频下目标跟踪。
⚠️ 使用此协议务必配置自定义参数4,请使用在线工具——视场角与自定义参数4配置进行计算。
