📚Miss Distance Protocol

©️Copyright Statement
This agreement is the exclusive property of Tofu Intelligence® and is protected by copyright laws and treaties. Unauthorized reproduction or use is prohibited.
The agreement provides a docking test client for customers to quickly apply.⚠️Note: This protocol is currently only supported by Tofu6.
0. Test Software Download ⤵️
1. Communication Specifications
This command is used for Tofu products to send miss distance and lens information to the servo controller, enabling target tracking based on miss distance via the servo control board.
Communication interface: RS485 (default) or TTL 3.3V, baud rate 115200. Tofu6 will automatically switch to this baud rate after protocol switching.
Set Custom Parameter 5 of Tofu6 to 2 to automatically switch to the miss distance protocol.
2. Target Tracking Miss Distance Push
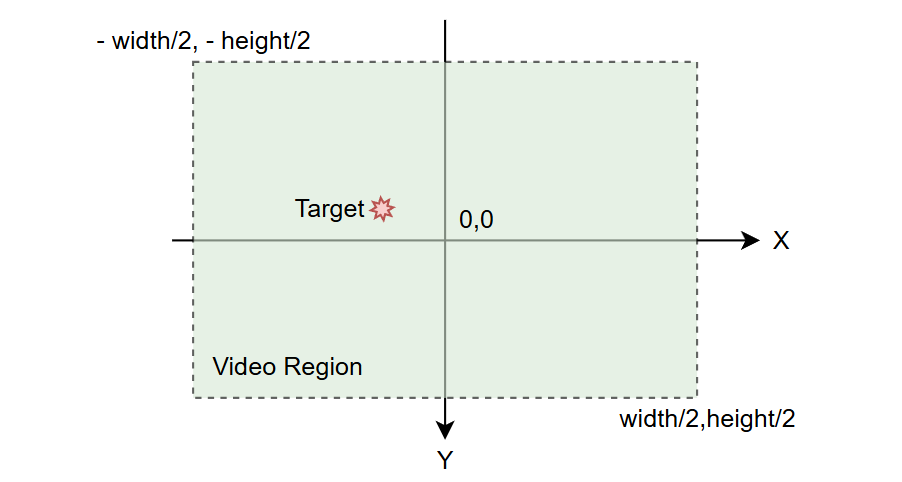
This command is sent in real-time by Tofu products to the servo with target tracking coordinate information after tracking starts.
Description of the target center point coordinate system is shown in the figure below:
A7 XX 02 0C 02 MM XH XM YH YL VLH VLL TLH TLL OT HHXX: Device ID, default 01
MM: 00 for visible light, 01 for thermal infrared.
The reference coordinate origin is located at the image center. The pushed coordinate information is 16-bit signed short-type data.XH: High 8 bits of the target center point X coordinate
XL: Low 8 bits of the target center point X coordinate, signed short typeYH: High 8 bits of the target center point Y coordinate
YL: Low 8 bits of the target center point Y coordinate, signed short typeVLH, VLL: Visible light field of view scaling factor, high 8 bits and low 8 bits, unsigned 16-bit integer. Current horizontal field of view = 60°*100/VL
Example: 00 5F means current horizontal field of view is 63°, 07 D0 means current horizontal field of view is 3°.TLH, TLL: Thermal infrared field of view scaling factor, high 8 bits and low 8 bits, unsigned 16-bit integer. Current horizontal field of view = 60°*100/TL
OT: Tracking status, 00 means tracking lost, 01 means tracking in progress, 02 means predictive tracking (target blocked)
HH: Checksum. Sum all bytes except A7 and HH, take the lower 8 bits of the sum in binary.
Example: A7 01 02 0C 02 00 00 05 00 05 00 64 03 E8 01 6B
Indicates the target position is at coordinate (5,5) (lower right of center), current horizontal field of view of visible light is 60 degrees (60*100/0x0064), current horizontal field of view of infrared is 6 degrees (60*100/0x03E8), and target tracking is in progress under visible light video.
