🛩️无人机目标三维仿真

©️版权声明
本软件版权归 瞳赋® Tofu Intelligence® 所有,提供持续创作并维护。
程序为Windows系统环境运行exe包,提供试用, 若需要授权码请联系销售。


此版本为基础版,可进行测试试用,完整版请联系我们。
Tofu Drone Target Simulator 1.0
客户版功能与使用说明
适用版本:1.0
公司:TofuIntelligence
软件概述
Tofu Drone Target Simulator - Tofu DTS是一款用于无人机轨迹仿真、场景演示、视频导出与数据集生成的桌面交付软件。
主要面向以下场景:
- 无人机任务路径规划与可视化演示
- 多机型飞行动画验证
- 客户演示视频制作
- 支持直接接入Tofu云台相机进行闭环测试
- 支持接入云台相机同步云台运动与变焦同步更新
- 支持实时视频流输出
- 无人机目标检测训练数据生成(VOC)
目前支持目标类别与场景
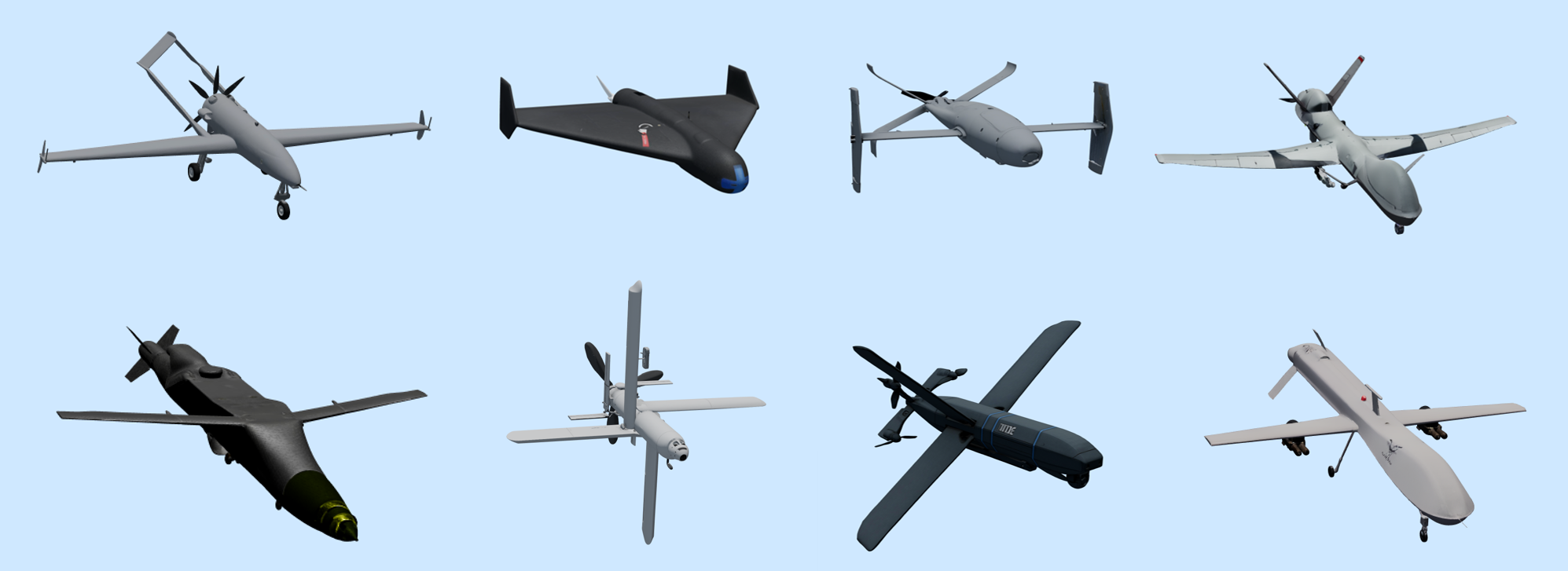
目标类型:
旋翼无人机:6种
固定翼无人机:23种
战斗机:17种
鸟:2种
场景类型:
图片背景:无限制
纯色背景:无限制
三维场景:41种
文档导航
- 软件定位
- 适用场景
- 功能总览
- 软件启动方式
- 首次使用推荐流程
- 界面分区说明
- 详细操作步骤
- 设备联动说明
- RTSP 推流使用说明
- 录像与 VOC 导出
- 授权说明
- 目录与文件说明
- 常见问题
- 客户使用建议
- 版权声明
软件定位
Tofu Drone Target Simulator 1.0 是一套集 目标观察、三维场景展示、轨迹编辑、外部设备联动、RTSP 推流、录像导出、VOC 数据集采集 于一体的综合仿真软件。
它主要用于以下工作:
- 对无人机目标进行视角观察与展示
- 在三维背景中模拟目标飞行过程
- 设计、修改和演示轨迹路径
- 接入角度设备与倍率设备做闭环联调
- 向第三方播放器或系统输出 RTSP 视频流
- 导出录像文件和 VOC 标注数据集
适用场景
本软件适用于以下典型业务和演示场景:
| 场景 | 用途说明 |
|---|---|
| 目标观察演示 | 在三维背景中观察无人机目标、切换角度和缩放倍率 |
| 路径规划展示 | 通过轨迹点编辑和轨迹线显示展示目标飞行路径 |
| 设备联调 | 接入角度设备、倍率设备进行闭环联动验证 |
| 视频输出 | 通过 RTSP 将画面输出到 VLC 或其他流媒体系统 |
| 数据采集 | 录制视频或导出 VOC 数据集用于训练、测试或归档 |
功能总览
1. 场景与背景能力
- 支持纯色背景、天空盒背景、三维场景背景
- 支持使用内置背景素材
- 支持通过网络地址加载外部
glb / gltf / fbx / obj模型 - 支持上传本地三维场景文件
- 支持场景缩放
- 支持快速定位到背景场景
- 支持部分大场景的观察边界自动适配
- 支持雾霾强度调节,用于模拟远距离观察效果
2. 目标显示与观察能力
- 支持多种无人机模型选择
- 支持在三维背景中显示目标模型
- 支持手动调整观察方向和缩放
- 支持在设备联动模式下由外部设备驱动画面
- 支持推流时自动隐藏辅助叠加元素,保证输出画面更干净
3. 轨迹编辑能力
- 支持添加轨迹点
- 支持调整轨迹点坐标和高度
- 支持轨迹线显示
- 支持显示或隐藏轨迹及点位
- 支持清空当前轨迹
4. 外设联动能力
- 支持角度设备接入
- 支持倍率设备接入
- 角度设备负责角度控制
- 倍率设备负责画面倍率控制
- 两类设备按功能分离控制,互不混淆
5. 视频推流能力
- 支持 RTSP 实时推流
- 支持 H.264 编码输出
- 支持自定义分辨率、帧率、码率、端口
- 支持生成 RTSP 地址供播放器或第三方系统拉流
6. 数据导出能力
- 支持本地录像导出
- 支持 VOC 数据集导出
- VOC 数据自动输出到
Annotations和JPEGImages - 使用时间戳前缀区分不同批次数据
7. 授权管理能力
- 支持一机一码授权
- 支持导入
license.dat / json / txt - 支持从
lic文件夹自动读取授权 - 支持显示授权状态、客户信息、有效期
- 未授权状态下限制录像和 VOC 导出
软件启动方式
推荐启动入口
客户环境建议优先使用以下方式之一:
- 双击
TofuDroneTargetSimulator.exe - 或运行
run-app.bat
建议
如果是客户演示、交付测试或现场使用,建议以交付包中的固定入口启动,不要直接改动app目录下的资源文件。
启动后的正常表现
正常情况下,启动后会出现主界面,并可进行如下操作:
- 查看授权状态
- 选择目标与场景
- 编辑轨迹
- 连接设备
- 开始 RTSP 推流
- 录像或导出 VOC 数据
启动前检查项
在正式使用前,建议先检查以下内容:
- 软件目录路径正常,可读可写
-
lic文件夹存在 - 如果需要授权,已准备好授权文件
- 如果需要 RTSP 推流,已准备好 FFmpeg 运行环境
- 如果需要外设联动,设备 IP、端口和网络已确认
首次使用推荐流程
如果是第一次使用本软件,建议按下面流程操作。
标准流程
- 启动软件
- 检查界面中的授权状态
- 选择背景场景
- 选择无人机模型
- 添加轨迹点并调整目标路径
- 手动检查视角、倍率、雾霾等观察效果
- 如需联调,连接角度设备和/或倍率设备
- 如需视频输出,配置 RTSP 参数并开始推流
- 如需录制,启动录像
- 如需训练数据,导出 VOC 数据集
快速演示流程
如果只是用于给客户快速看效果,推荐按以下简化流程:
- 启动软件
- 选择一个背景场景
- 选择一个无人机模型
- 添加少量轨迹点
- 开始目标运动
- 调整视角或接入角度设备
- 开始 RTSP 推流并在 VLC 中查看
界面分区说明
1. 授权区域
该区域主要显示:
- 当前授权状态
- 客户名称
- 授权到期时间
- 授权导入入口
主要用途:
- 查看当前软件是否已激活
- 导入新的授权文件
- 判断录像和 VOC 导出是否可用
2. 闭环联调区域
该区域用于连接外部设备,主要包括:
- 角度设备(Pelco-D)
- 倍率设备
- 当前连接状态显示
- 设备断开操作
主要用途:
- 建立外部设备与画面之间的联动关系
- 演示角度驱动与倍率驱动效果
3. RTSP 推流区域
该区域通常包含以下配置:
- 推流分辨率
- 推流帧率
- 推流码率
- RTSP 端口
- 开始推流 / 停止推流按钮
- RTSP 地址显示与复制
主要用途:
- 将当前仿真画面输出为 RTSP 流
4. 场景设置区域
该区域主要用于:
- 切换背景类型
- 选择内置场景
- 加载远程场景 URL
- 上传本地模型文件
- 调整场景缩放
- 定位到场景中心
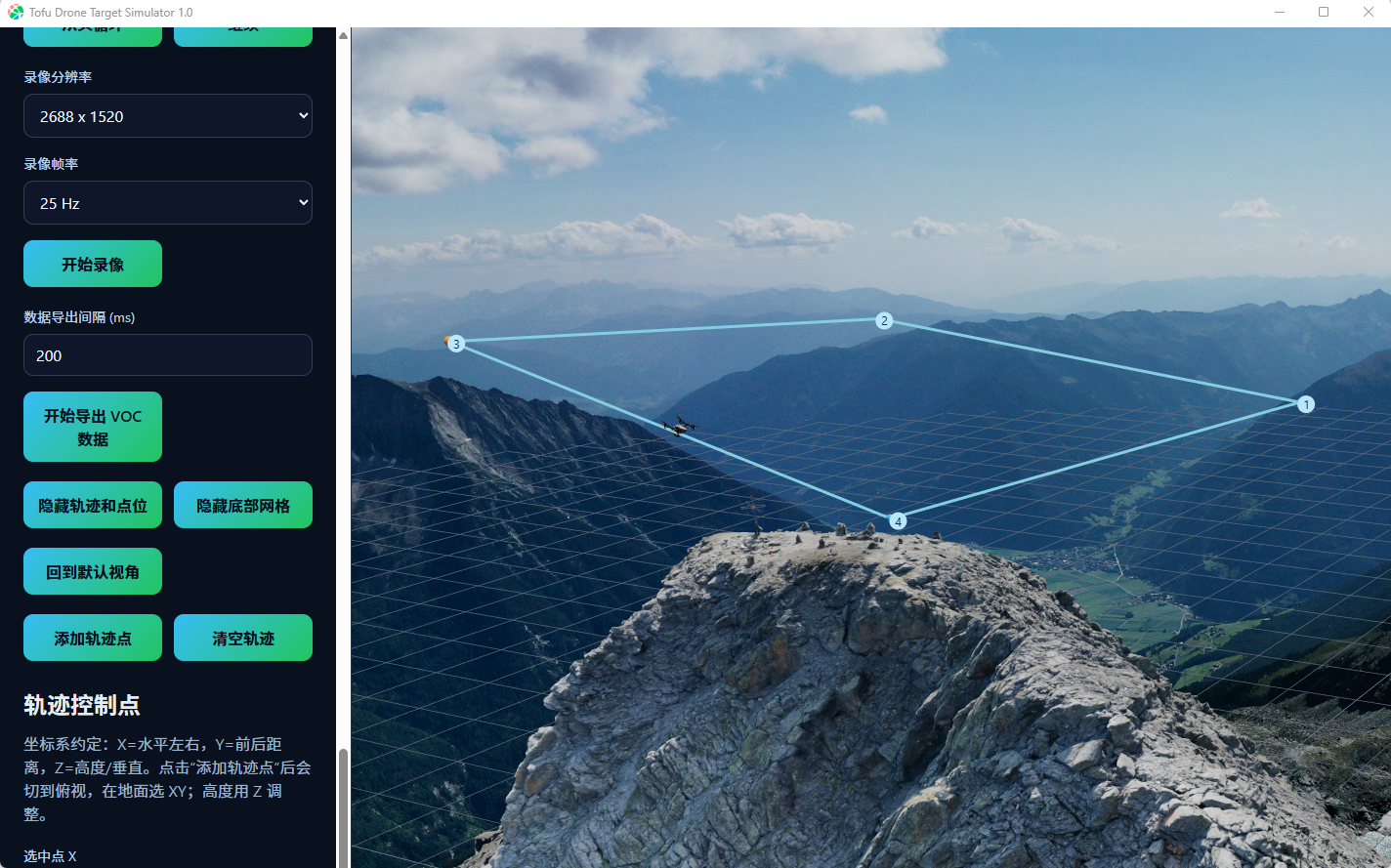
5. 轨迹控制区域
该区域用于:
- 添加轨迹点
- 编辑轨迹点位置
- 显示或隐藏轨迹
- 清空轨迹
6. 录制与导出区域
该区域用于:
- 录像开始与结束
- VOC 数据集导出
- 查看导出提示信息
详细操作步骤
一、启动软件
操作步骤
- 进入软件目录
- 找到
TofuDroneTargetSimulator.exe - 双击运行
- 等待主界面加载完成
正常结果
- 软件界面正常显示
- 授权状态区域可见
- 场景、轨迹、推流等面板可操作
如果启动失败
请优先检查:
- 路径是否被改动
- 文件是否完整
- 是否有安全软件阻止运行
二、导入或检查授权
方式 A:自动读取授权文件
将授权文件放入软件目录下的 lic 文件夹:
TofuSim\
├── TofuDroneTargetSimulator.exe
├── run-app.bat
└── lic\
└── license.dat然后重新启动软件。
方式 B:手动导入授权
- 打开软件
- 找到授权区域
- 点击导入授权文件按钮
- 选择
license.dat或其他支持格式的授权文件 - 等待验证完成
验证成功后可查看
- 授权状态是否显示为已激活
- 客户信息是否正确
- 到期时间是否正确
注意
未授权状态下,录像和 VOC 导出功能会被限制。
三、选择场景与背景
场景选择步骤
- 找到背景设置区域
- 选择背景类型
- 根据需要选择:
- 纯色背景
- 天空盒背景
- 三维场景背景
- 从素材库中选择内置场景,或加载外部文件
加载外部场景的方式
方式 A:通过 URL 加载
- 在场景 URL 输入框中输入模型地址
- 确保链接文件格式受支持
- 点击加载或等待自动加载
方式 B:上传本地文件
- 点击本地文件上传入口
- 选择本地
glb / gltf / fbx / obj文件 - 等待软件完成解析和显示
场景调整步骤
- 使用场景缩放功能调整整体比例
- 点击定位到背景场景
- 检查目标与背景的相对位置是否合适
推荐做法
- 大场景优先先定位到背景场景,再做缩放
- 如果画面目标过小,可先调整视角和缩放,再添加轨迹点
四、选择无人机模型
操作步骤
- 找到无人机模型选择区域
- 从列表中选择目标模型
- 等待模型加载显示
建议
- 演示用可优先选外观明显的机型
- 数据采集前建议固定一个模型,避免同批次数据混杂
五、轨迹编辑
1. 添加轨迹点
标准步骤
- 点击
添加轨迹点 - 界面进入轨迹点添加状态
- 在场景中点击目标位置
- 新轨迹点生成后,进入下一步调整
说明
- 轨迹点用于描述目标飞行路径
- 多个轨迹点会形成整条轨迹线
- 轨迹点越多,路径越细致
2. 调整轨迹点
操作步骤
- 选中要调整的轨迹点
- 修改其位置参数
- 如需改变高度,调整 Z 值
- 观察轨迹线是否符合预期
推荐做法
- 先粗略放点,再逐个微调
- 先确定水平位置,再调高度
3. 显示或隐藏轨迹
如画面元素较多,可使用显示/隐藏轨迹和点位功能来简化观察画面。
适用场景:
- 只关注目标和背景时
- 需要更干净的 RTSP 输出画面时
4. 清空轨迹
如果当前轨迹不再需要,可使用清空轨迹功能。
建议在清空前确认:
- 当前轨迹是否已经保存或确认
- 是否会影响当前演示流程
六、观察视角与手动控制
基本手动操作
软件支持通过鼠标、滚轮和快捷操作对画面进行观察。
可完成的典型操作:
- 旋转观察方向
- 放大和缩小视角
- 检查目标与背景的空间关系
使用建议
- 编辑轨迹时,建议先用较容易观察的角度操作
- 做推流展示时,建议将画面调整到稳定观察视角后再开始推流
雾霾效果调节
如果需要模拟远距离观察条件,可调整雾霾强度。
用途:
- 模拟能见度下降时的观察效果
- 强调近景与远景差异
- 展示目标在复杂环境中的可见性
七、闭环联调详细说明
1. 角度设备(Pelco-D)
用途
角度设备用于控制视角方向。
连接步骤
- 找到闭环联调区域中的角度设备部分
- 输入设备 IP 地址
- 输入设备端口
- 点击连接
- 等待连接成功状态显示
连接成功后的表现
- 角度状态显示更新
- 视角方向可随设备动作变化
- 手动角度控制会受限
断开步骤
- 点击断开
- 等待状态恢复
- 断开后可恢复手动角度调整
2. 倍率设备
用途
倍率设备用于控制画面放大倍率。
连接步骤
- 在闭环联调区域找到倍率设备部分
- 输入设备连接参数
- 点击连接
- 观察连接状态与倍率显示
连接成功后的表现
- 画面缩放可跟随设备倍率变化
- 手动远近调整会受限
3. 联动原则
当前版本联动逻辑如下:
| 设备类型 | 接管内容 | 不接管内容 |
|---|---|---|
| 角度设备 | 视角角度 | 倍率 |
| 倍率设备 | 画面倍率 | 角度 |
重要说明
- 连接角度设备,不会自动接管倍率
- 连接倍率设备,不会自动接管角度
- 两类设备断开后,各自对应的手动控制恢复
八、RTSP 推流使用说明
1. 推流前准备
在开始推流前,建议先完成以下准备:
- 场景已加载完成
- 目标模型已正确显示
- 轨迹已配置完成
- 观察视角已调整到合适位置
- 如果要接设备,先完成设备连接
2. RTSP 参数设置
推流区域通常可设置以下参数:
| 参数 | 作用 | 推荐值 |
|---|---|---|
| 分辨率 | 控制输出画面大小 | 按项目需求选择 |
| 帧率 | 控制输出流畅度 | 25 fps |
| 码率 | 控制带宽与画质平衡 | 4000 kbps 左右 |
| 端口 | RTSP 服务端口 | 默认值或按需求调整 |
3. 开始推流步骤
- 打开 RTSP 推流区域
- 设定分辨率、帧率、码率、端口
- 点击
开始推流 - 等待界面生成 RTSP 地址
- 点击复制地址
4. 在 VLC 中观看
- 打开 VLC
- 选择“打开网络串流”
- 粘贴软件生成的 RTSP 地址
- 点击播放
5. 推流时的软件行为
推流开始后,软件会自动隐藏部分辅助叠加内容,例如:
- 底部网格
- 轨迹点位
- 轨迹线
这样可以使输出画面更适合实际观看和录像。
6. 停止推流
- 返回软件 RTSP 区域
- 点击
停止推流 - 等待状态恢复
停止推流后建议
- 如需继续修改场景,可在停止后再调整
- 如需重新开始推流,建议先确认设备联动状态正常
九、录像与 VOC 导出
1. 本地录像
前提条件
- 软件已授权
- 当前画面已准备完成
操作步骤
- 确认授权状态正常
- 设置录像参数
- 点击开始录像
- 完成演示后点击停止录像
- 等待导出完成提示
使用建议
- 录像前尽量先固定观察角度
- 录像中避免频繁大幅调整参数
2. VOC 数据导出
前提条件
- 软件已授权
- 当前场景、目标和轨迹已配置完成
标准步骤
- 设置数据导出间隔
- 点击开始导出 VOC 数据
- 在采集过程中按需要调整目标与场景
- 点击结束导出
- 等待软件保存数据
导出结果
软件会在运行目录下生成:
AnnotationsJPEGImages
并带有批次时间戳前缀,便于区分不同次导出结果。
十、授权说明
1. 支持的授权文件格式
支持以下格式:
*.dat*.json*.txt
推荐优先使用:
license.dat
2. 自动读取规则
如果在软件目录下存在 lic 文件夹,且其中放有有效授权文件,软件重启后会自动尝试读取。
3. 授权成功后的可用能力
授权生效后可完整使用:
- 录像导出
- VOC 数据导出
- 客户信息与有效期查看
4. 未授权状态的限制
未授权时,软件仍可用于:
- 场景浏览
- 目标观察
- 轨迹编辑
- 设备联动
- RTSP 推流
但以下功能受限:
- 录像导出
- VOC 数据导出
目录与文件说明
典型交付目录
TofuSim\
├── TofuDroneTargetSimulator.exe
├── run-app.bat
├── app\
├── docs\
├── lic\
└── tools\目录用途说明
| 目录或文件 | 作用 |
|---|---|
TofuDroneTargetSimulator.exe |
软件主入口 |
run-app.bat |
测试或维护启动入口 |
app\ |
前端资源、模型、运行文件 |
docs\ |
用户手册、版权说明等文档 |
lic\ |
放置 License 文件 |
常用输出目录
| 目录 | 内容 |
|---|---|
Annotations\ |
VOC XML 标注文件 |
JPEGImages\ |
VOC 图像文件 |
常见问题
1. 软件无法启动
建议依次检查:
- 启动文件是否完整
- 路径是否被移动或改名
- 是否被安全软件拦截
- 是否缺少依赖环境
2. 授权无法识别
建议检查:
- 授权文件是否与机器匹配
- 授权文件是否过期
- 是否放在正确的
lic目录 - 是否已经重启软件
3. RTSP 无法播放
建议检查:
- 软件中是否已经点击开始推流
- RTSP 地址是否复制正确
- 端口是否被占用
- 播放器是否支持 RTSP over TCP
- 网络和防火墙是否允许访问
4. 录像或 VOC 导出失败
建议检查:
- 当前是否已授权
- 软件目录是否有写权限
- 磁盘是否有足够空间
- 当前是否有其他程序占用目标文件
5. 设备连接失败
建议检查:
- 设备 IP 是否正确
- 端口是否正确
- 设备与本机是否在同一网络
- 是否已有其他程序占用设备连接
客户使用建议
日常演示建议
- 先启动软件,再加载场景和目标
- 重要演示前先检查授权状态
- 推流前先固定画面视角
- 大场景建议先定位到背景,再微调缩放
数据采集建议
- 导出前先确认轨迹是否最终确定
- 采集同一批数据时尽量不要频繁切换模型
- 建议每批次导出后及时备份
Annotations与JPEGImages
设备联调建议
- 先单独测试角度设备
- 再测试倍率设备
- 最后测试双设备配合场景
